月面探査をみんなの手のひらに。
月面探査ローバー「TETRIS」と、ローバーコントロールシステムアプリが切り拓くパーソナル宇宙開発の時代。
タブレットが宇宙への新しい扉になる。
月面探査をみんなの手のひらに。
月面探査ローバー「TETRIS」と、ローバーコントロールシステムアプリが切り拓くパーソナル宇宙開発の時代。
タブレットが宇宙への新しい扉になる。
「私が月面に最後の一歩を踏みしめた後、人類はしばらく地球に帰ります。 しかし未来までこのままではないと信じていま す。私たち人類は平和と希望と共に再び月に戻るでしょう」
アポロ計画最後の宇宙飛行士が1972年に宣言して以来、月面探査の歴史は、長い長い眠りについていました。
しかし、いま、民間の力で再び動き出そうとしています。
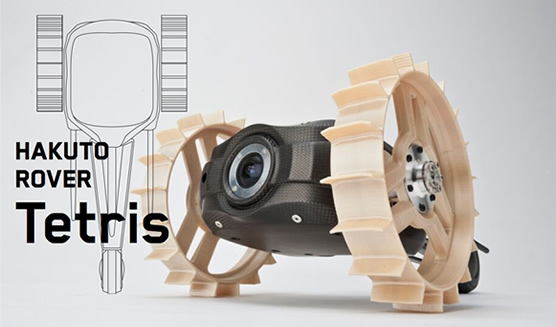
民間月面探査チームHAKUTOは、誰にでも開かれた宇宙開発を実現するため、月面探査ローバーの開発を行っています。
そのプレフライトモデルTETRISは、スマートタブレットによる遠隔操縦が可能で、個人が月面探査を行う未来のための、第一歩となるプロトタイプシステムです。
誰もが持つ、新しい土地を冒険するワクワクや興奮という感情を宇宙規模に拡大し全く新しい体験を創造する、そんな役割を担っています。

宇宙開発のコストで最も支配的なのが、質量に比例して決まる打上げ費です。ハクトの月面探査ローバーは、日本が得意とする小型軽量化の設計思想をふんだんに取り入れ、NASAが開発するローバーの1/2500の重さで惑星探査を実現します。

地球と月の距離は離れているため、電波の往復に約3秒の時間を要します。地球では想像しにくいタイムラグでも正確な操縦を行うために、ラジコン型ではない新しい遠隔操縦インタフェースを導入しています。

ローバーから送られてくるデータは、カメラが捉えた月面の映像とローバーの状態を表わすテレメトリ情報だけです。貴重な数値データを、操縦者がいちはやく処理するために、データに連動したビジュアルとサウンドを設計しました。

ローバーの操縦を通じて月面探査の仕組みや宇宙へ挑戦するワクワクをより多くの人たちに体験してもらいたい。そんな想いから様々なイベントに「月面探査ローバー操縦体験」として出展しています。
「宇宙」「ロボット」「操縦」などのキーワードは子供の興味を惹きつけます。体験を通して科学やプログラミングなどへの関心を高め、未来の宇宙への挑戦者へきっかけをプレゼントします。
エンジニアイベントやベンチャーイベントへも出展。民間による宇宙開発に実際に触れてもらうことで、テクノロジーやビジネスの分野でも多くの注目を集めています。
百貨店などの商業施設での出展では集客のためのアトラクションとして賑わいを生み出します。
アプリを使って操縦するローバーは、月面探査ローバーのプリフライトモデルという段階のものです。2017年末までの打ち上げを予定しているローバー開発のひとつの段階のもので、実際に熱真空試験や振動試験などにも使用しています。
打ち上げコストを下げるために超小型・軽量な素材を使い、開発コストを下げるために民生品を部品として活用しています。
操縦体験をより楽しくするために、ローバーの走行時間や距離などからスコアを計算しランクを表示する機能を搭載。月面での「安全運転」を評価します。

ハクトは、世界初の民間月面探査の実現を目指す日本の宇宙開発チームです。ベンチャー、大学、そしてプロボノと呼ばれるボランティアメンバーと、さまざまなバックグラウンドを持った人が集まって活動しています。

SNS
活動の最新情報を発信しています